CS131, Homewrok1, Filters-Instagram
Homework 1
This notebook includes both coding and written questions. Please hand in this notebook file with all the outputs and your answers to the written questions.
这份作业覆盖的主题有线性滤波器,卷积和互相关性。
1 | # Setup |
Part 1: Convolutions
1.1 Commutative Property (10 points)
Recall that the convolution of an image $f:\mathbb{R}^2\rightarrow \mathbb{R}$ and a kernel $h:\mathbb{R}^2\rightarrow\mathbb{R}$ is defined as follows:
$$
(f*h)[m,n]=\sum_{i=-\infty}^\infty\sum_{j=-\infty}^\infty f[i,j]\cdot h[m-i,n-j]
$$
Or equivalently,
\begin{align} (f*h)[m,n] &= \sum_{i=-\infty}^\infty\sum_{j=-\infty}^\infty h[i,j]\cdot f[m-i,n-j]\\ &= (h*f)[m,n] \end{align}Show that this is true (i.e. prove that the convolution operator is commutative: $fh = hf$).
Your Answer: Write your solution in this markdown cell. Please write your equations in LaTex equations.
题目就是证明卷积交换律。
证明:
将式中积分变量 $i$ 和 $j$ 置换为 $m-x$ 和 $n-y$,则
证毕。
1.2 Linear and Shift Invariance (10 points)
Let $f$ be a function $\mathbb{R}^2\rightarrow\mathbb{R}$. Consider a system $f\xrightarrow{s}g$, where $g=(f*h)$ with some kernel $h:\mathbb{R}^2\rightarrow\mathbb{R}$. Show that $S$ defined by any kernel $h$ is a Linear Shift Invariant (LSI) system. In other words, for any $h$, show that $S$ satisfies both of the following:
- $S[a\cdot{f_1}+b\cdot{f_2}]= a\cdot{S[f_1]}+b\cdot{S[f_2]}$
- If $f[m,n]\xrightarrow{s}g[m,n]$ then $f[m-m_0,n-n_0]\xrightarrow{s}g[m-m_0,n-n_0]$
Your Answer: Write your solution in this markdown cell. Please write your equations in LaTex equations.
第一题证明:
\begin{align} S[a\cdot{f_1}+b\cdot{f_2}] &= [a\cdot{f_1}+b\cdot{f_2}]*h[m,n]\\ &=\sum_{i=-\infty}^\infty\sum_{j=-\infty}^\infty (a\cdot f_1[i,j]+b \cdot f_2[i,j])\cdot h[m-i,n-j] \\ &=\sum_{i=-\infty}^\infty\sum_{j=-\infty}^\infty (a \cdot f_1[i,j] \cdot h[m-i,n-j] + b \cdot f_2[i,j] \cdot h[m-i,n-j]) \\ &= a \cdot \sum_{i=-\infty}^\infty\sum_{j=-\infty}^\infty f_1[i,j] \cdot h[m-i,n-j] + b \cdot \sum_{i=-\infty}^\infty\sum_{j=-\infty}^\infty f_2[i,j] \cdot h[m-i,n-j] \\ &=a \cdot (f_1*h) + b \cdot (f_2*h) \\ &= a \cdot S[f_1] + b\cdot S[f_2] \end{align}证毕.
第二题没证,不知道怎么证明线性移不别.
1.3 Implementation (30 points)
In this section, you will implement two versions of convolution:
conv_nestedconv_fast
First, run the code cell below to load the image to work with.
1 | # Open image as grayscale |
Now, implement the function conv_nested in filters.py. This is a naive implementation of convolution which uses 4 nested for-loops. It takes an image $f$ and a kernel $h$ as inputs and outputs the convolved image $(f*h)$ that has the same shape as the input image. This implementation should take a few seconds to run.
- Hint: It may be easier to implement $(h*f)$
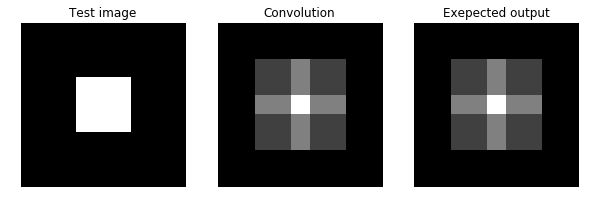
We’ll first test your conv_nested function on a simple input.
思路:使用四层嵌套循环来实现对图像的卷积操作。
两种方案:
按照卷积函数的公式定义来进行计算。
$$
(f*h)[m,n]=\sum_{i=-\infty}^\infty\sum_{j=-\infty}^\infty f[i,j]\cdot h[m-i,n-j]
$$按照卷积计算的可视化过程进行计算,即翻转内核,移动内核,累加迭代的过程。
conv_nested的实现在filters.py中。
1 | from filters import conv_nested |
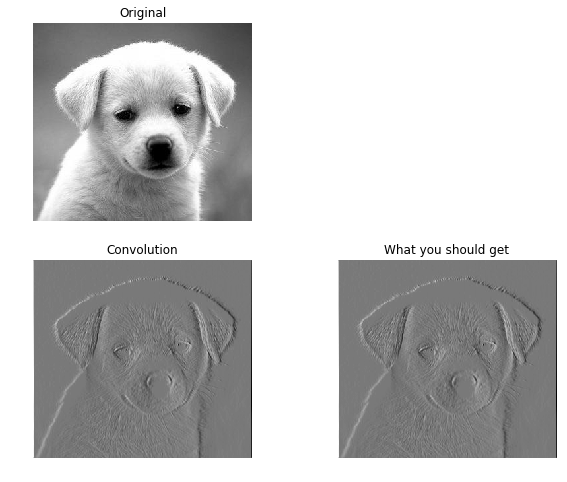
Now let’s test your conv_nested function on a real image.
简单的卷积测试,这是一个X方向上的边缘检测算子。
1 | from filters import conv_nested |
Let us implement a more efficient version of convolution using array operations in numpy. As shown in the lecture, a convolution can be considered as a sliding window that computes sum of the pixel values weighted by the flipped kernel. The faster version will i) zero-pad an image, ii) flip the kernel horizontally and vertically, and iii) compute weighted sum of the neighborhood at each pixel.
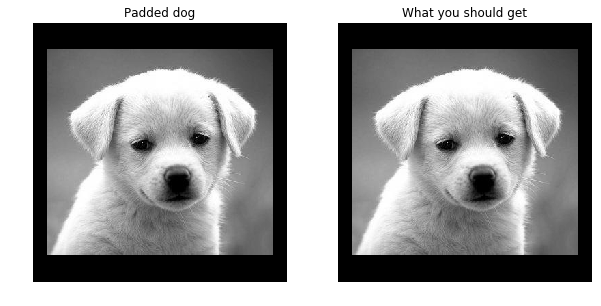
First, implement the function zero_pad in filters.py.
由于判断卷积核是否超出图像边界这一步导致计算很慢,这里有一种更快的方式:
- 对图像边缘进行零填充
- 翻转卷积核
- 移动卷积核计算每个像素位置的卷积结果
零填充的操作就两步:
- 根据填充边缘大小生成一个大背景
- 将原图拷贝到背景中心
1 | from filters import zero_pad |
Next, complete the function conv_fast in filters.py using zero_pad. Run the code below to compare the outputs by the two implementations. conv_fast should run significantly faster than conv_nested.
Depending on your implementation and computer, conv_nested should take a few seconds and conv_fast should be around 5 times faster.
1 | from filters import conv_fast |
conv_nested: took 5.063853 seconds.
conv_fast: took 1.080498 seconds.
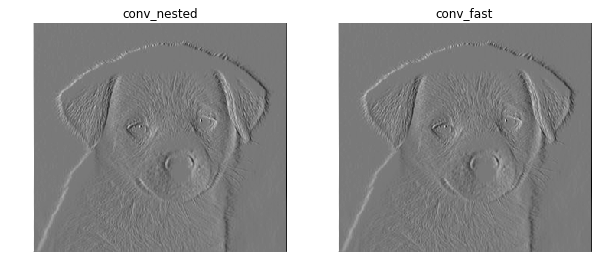
的确实现了约5倍大小的运行速度提升,需要指出的是,5倍的提升是(零填充+翻转卷积核计算)相对于(越界判断+卷积公式计算)来的。
经过测试,如果conv_nested是通过(翻转卷积核计算+越界判断)方式的话,本身运行时间大约在1.4s左右。
Extra Credit 1 (1% of final grade)
Devise a faster version of convolution and implement conv_faster in filters.py. You will earn extra credit only if the conv_faster runs faster (by a fair margin) than conv_fast and outputs the same result.
如何实现更快的卷积计算? 我才想起来吴恩达在Machine Learning里特别强调了向量化带来的计算效率的提高。
参考了文章【算法+图像处理】2D卷积与快速卷积算法C语言实现,
偷看了一眼mikucy的作业,
向量化的思路就是:
- 将卷积核进行向量化
- 将迭代过程中的计算块(计算中心及其领域)进行向量化,由于运算的对象都是核,此处可以将向量化的计算块拼成矩阵
- 两者进行内积计算,并reshape成原有图像大小
计算过程中的维度对齐:
- image: $(H_i,W_i)$
- kernel: $(H_k,W_k)$
- kernel_vectorized: $(H_k\cdot W_k,1)$
- patch_vectorized: $(1, H_k\cdot W_k)$
- image_vectorized2Matrix: $(H_i\cdot W_i, H_k\cdot W_k)$
- image_vectorized2Matrix * kernel_vectorized: $(H_i\cdot W_i,1)$
- reshaped: $(H_i,W_i)$
1 | from filters import conv_faster |
conv_fast: took 1.084435 seconds.
conv_faster: took 0.310908 seconds.
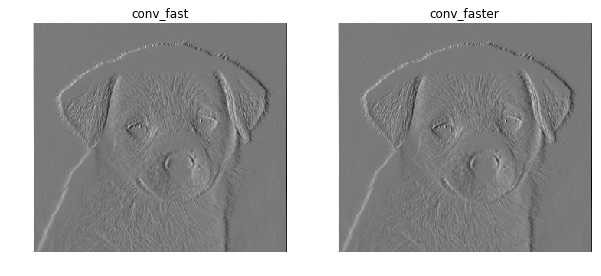
经过测试,向量化之后的卷积操作的确又快了5倍左右。不错不错。
Part 2: Cross-correlation
Cross-correlation of two 2D signals $f$ and $g$ is defined as follows:
$$
(f\star{g})[m,n]=\sum_{i=-\infty}^\infty\sum_{j=-\infty}^\infty f[i,j]\cdot g[i-m,j-n]
$$
2.1 Template Matching with Cross-correlation (12 points)
使用互相关性实现模板匹配
Suppose that you are a clerk at a grocery store. One of your responsibilites is to check the shelves periodically and stock them up whenever there are sold-out items. You got tired of this laborious task and decided to build a computer vision system that keeps track of the items on the shelf.
Luckily, you have learned in CS131 that cross-correlation can be used for template matching: a template $g$ is multiplied with regions of a larger image $f$ to measure how similar each region is to the template.
The template of a product (template.jpg) and the image of shelf (shelf.jpg) is provided. We will use cross-correlation to find the product in the shelf.
Implement cross_correlation function in filters.py and run the code below.
- Hint: you may use the conv_fast function you implemented in the previous question.
note 可以使用之前的卷积函数来进行计算,但要注意卷积里面对卷积核进行翻转,而计算互相关时,匹配模板如同滤波一样,并不需要翻转匹配模板。
1 | from filters import cross_correlation |
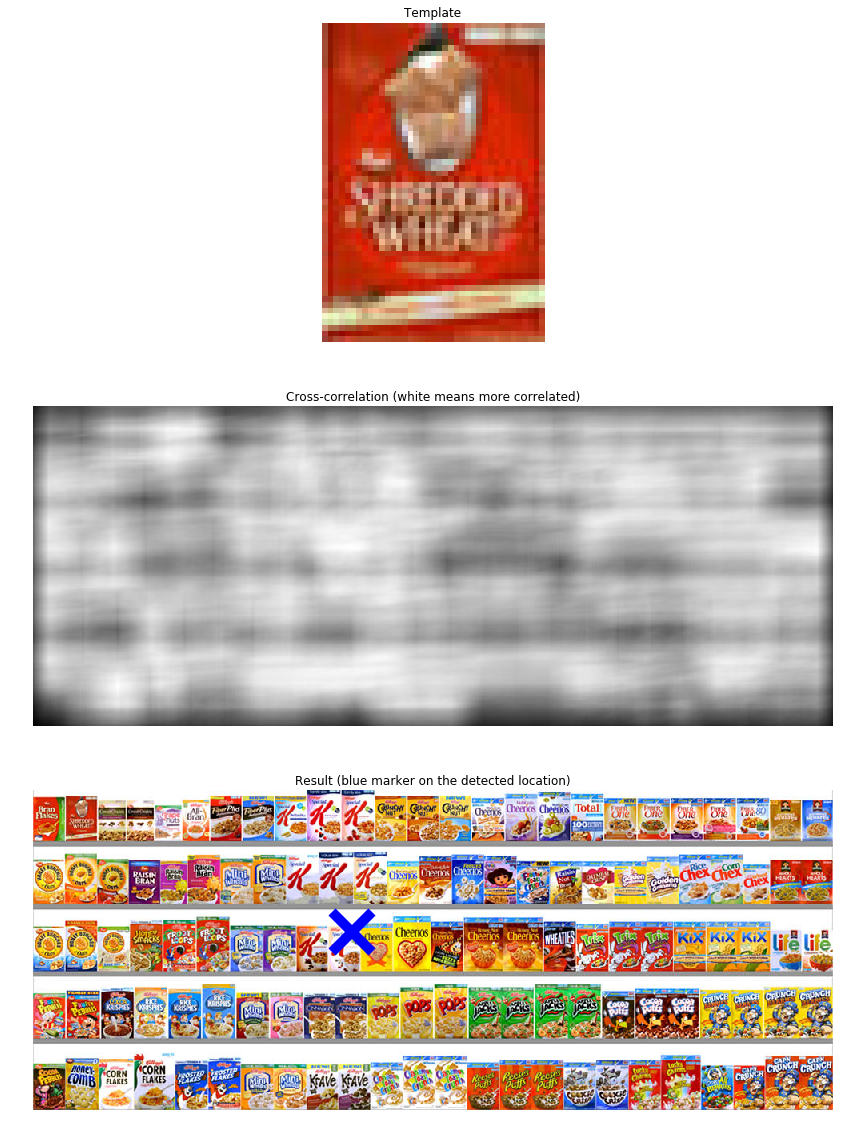
这里程序用了找匹配结果的最大值来判断匹配目标的所在。
Interpretation
How does the output of cross-correlation filter look like? Was it able to detect the product correctly? Explain what might be the problem with using raw template as a filter.
Your Answer: Write your solution in this markdown cell.
不是很清楚为啥不做任何处理匹配效果会很差。
- 一个可能是图像和模板的亮度不同导致了匹配的出错。
- 还有一个问题就是,一般的滤波核每个元素和加起来为一的,这个匹配图像作为内核去做计算的,肯定计算结果爆炸了呀,都是趋于255了?能量有种不协调的感觉
2.2 Zero-mean cross-correlation (6 points)
A solution to this problem is to subtract off the mean value of the template so that it has zero mean.
Implement zero_mean_cross_correlation function in filters.py and run the code below.
一种解决方案就是对匹配模板做零均值的操作。
1 | from filters import zero_mean_cross_correlation |
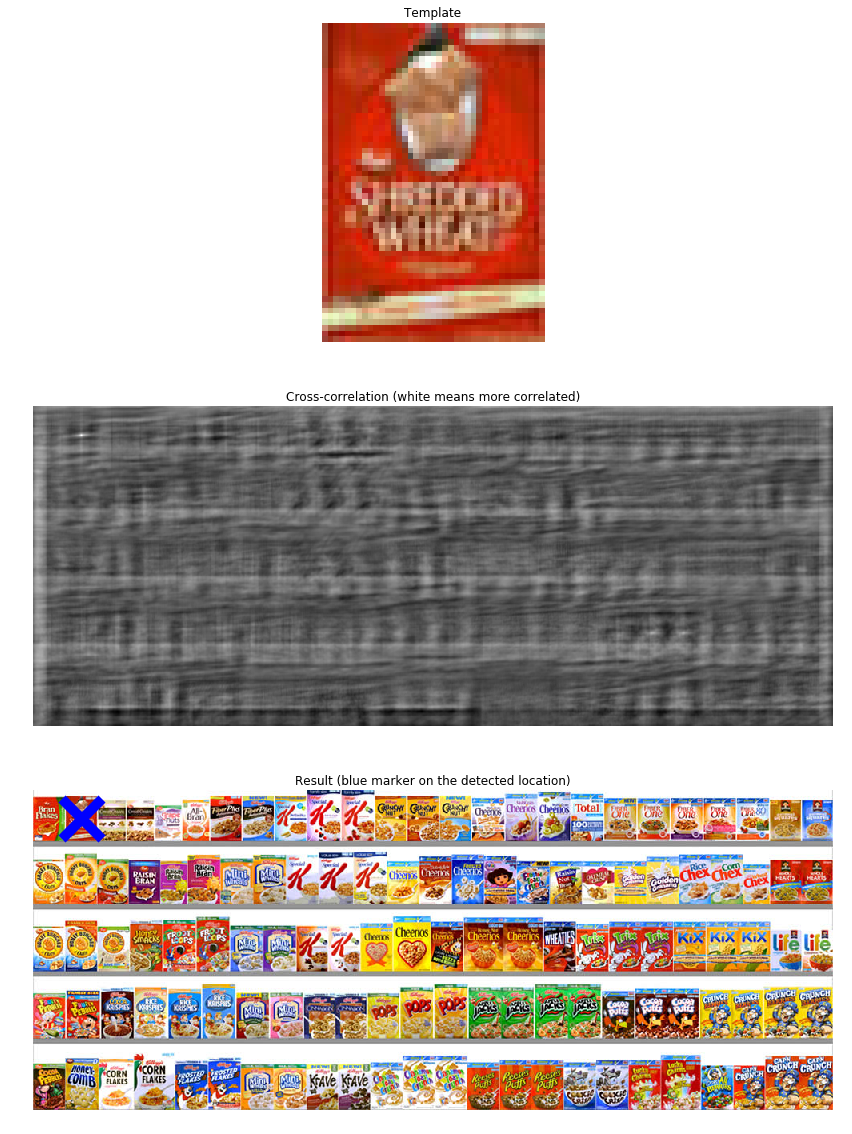
这样看来对匹配模板对零均值操作效果奇佳啊。
You can also determine whether the product is present with appropriate scaling and thresholding.
增加缩放和阈值来做判断。
阈值可以理解,不知道缩放的意义在于什么?
1 | def check_product_on_shelf(shelf, product): |

The product is on the shelf

The product is not on the shelf
2.3 Normalized Cross-correlation (12 points)
One day the light near the shelf goes out and the product tracker starts to malfunction. The zero_mean_cross_correlation is not robust to change in lighting condition. The code below demonstrates this.
1 | from filters import normalized_cross_correlation |
![]()
A solution is to normalize the pixels of the image and template at every step before comparing them. This is called normalized cross-correlation.
The mathematical definition for normalized cross-correlation of $f$ and template $g$ is:
$$
(f\star{g})[m,n]=\sum_{i,j} \frac{f[i,j]-\overline{f_{m,n}}}{\sigma_{f_{m,n}}} \cdot \frac{g[i-m,j-n]-\overline{g}}{\sigma_g}
$$
where:
- $f_{m,n}$ is the patch image at position $(m,n)$
- $\overline{f_{m,n}}$ is the mean of the patch image $f_{m,n}$
- $\sigma_{f_{m,n}}$ is the standard deviation of the patch image $f_{m,n}$
- $\overline{g}$ is the mean of the template $g$
- $\sigma_g$ is the standard deviation of the template $g$
Implement normalized_cross_correlation function in filters.py and run the code below.
直接对整幅待匹配的图做归一化操作,实验下来效果不行。
分析下来也是,正确的图像区域,如果是做整幅图的归一化的话,明显受到了其他区域诸如亮度颜色等的影响,干扰了匹配。
按照题目的意思是应该对每个待匹配块做归一化操作,然后比较匹配程度。
1 | from filters import normalized_cross_correlation |
遍历的方式太慢,太耗时间了。我怀疑这种做法了。
Part 3: Separable Filters
3.1 Theory (10 points)
Consider a $M_1\times{N_1}$ image $I$ and a $M_2\times{N_2}$ filter $F$. A filter $F$ is separable if it can be written as a product of two 1D filters: $F=F_1F_2$.
For example,
$$
F=
\begin{bmatrix}
1 & -1 \\
1 & -1
\end{bmatrix}
$$
can be written as a matrix product of
$$
F_1=
\begin{bmatrix}
1 \\
1
\end{bmatrix},
F_2=
\begin{bmatrix}
1 & -1
\end{bmatrix}
$$
Therefore $F$ is a separable filter.
Prove that for any separable filter $F=F_1F_2$, $I*F=(I*F_1)*F_2$
Your Answer: Write your solution in this markdown cell. Please write your equations in LaTex equations.
证明
\begin{align} (I*F)[M_2,N_2] &= \sum_{i=-\infty}^\infty \sum_{j=-\infty}^\infty I[i,j]\cdot F[M_2-i,N_2-j] \tag{1}\\ &= \sum_{i=-\infty}^\infty\sum_{j=-\infty}^\infty I[i,j]\cdot F_1[M_2-i]\cdot F_2[N_2-j]\\ &= \sum_{j=-\infty}^\infty F_2[N_2-j] \cdot (\sum_{i=-\infty}^\infty I[i,j]\cdot F_1[M_2-i]) \tag{2}\\ &= \sum_{j=-\infty}^\infty F_2[N_2-j]\cdot(I(j)*F_1)\\ &= F_2 * (I * F_1) \\ &= (I * F_1) * F_2 \end{align}证毕
3.2 Complexity comparison (10 points)
(i) How many multiplications do you need to do a direct 2D convolution (i.e. $I*F$?)
(ii) How many multiplications do you need to do 1D convolutions on rows and columns (i.e. $(I*F_1)*F_2$)
(iii) Use Big-O notation to argue which one is more efficient in general: direct 2D convolution or two successive 1D convolutions?
Your Answer: Write your solution in this markdown cell. Please write your equations in LaTex equations.
复杂度比较
根据上面的推导,可以看到式(1) 和 式(2)的区别:
- $I*F$乘法操作的次数为 $M_1 \cdot N_1$
- $(I*F_1)*F_2$乘法操作的次数为 $M_1+ N_1$
- 我不会Big-O啊,明显分解的效率高哇。
Now, we will empirically compare the running time of a separable 2D convolution and its equivalent two 1D convolutions. Gaussian kernel, widely used for blurring images, is one example of a separable filter. Run the code below to see its effect.
1 | # Load image |
In the below code cell, define the two 1D arrays (k1 and k2) whose product is equal to the Gaussian kernel.
1 | # The kernel can be written as outer product of two 1D filters |
We now apply the two versions of convolution to the same image, and compare their running time. Note that the outputs of the two convolutions must be the same.
1 | # Perform two convolutions using k1 and k2 |
Normal convolution: took 13.643008 seconds.
Separable convolution: took 5.948668 seconds.
1 | # Check if the two outputs are equal |